Intuisi Teorema Dasar Kalkulus
Secara intuitif, teorema dasar kalkulus dengan sederhana menyatakan bahwa jumlah perubahan infinitesimal suatu kuantitas terhadap waktu (atau terhadap kuantitas lainnya) akan menumpuk menjadi perubahan total kuantitas.
Untuk memahami pernyataan ini, diberikan sebuah contoh: Misalkan sebuah partikel berpindah mengikuti garis lurus dengan posisinya diberikan sebagai x(t), dengan t adalah waktu dan x(t) berarti x adalah fungsi dari t. Turunan dari fungsi ini sama dengan perbuahan infinitesimal kuantitas, dx, per perubahan infinitesimal waktu, dt (tentu saja turunannya sendiri tergantung pada waktu). Didefinisikan pula perubahan jarak per perubahan waktu ini sebagai kecepatan v partikel. Dalam notasi Leibniz:

Dengan menata ulang persamaan ini, terlihat bahwa:

Dengan logika di atas, sebuah perubahan x (atau Δx) adalah jumlah dari perbuahan infinitesimal dx. Ia juga sama dengan jumlah dari hasil kali infinitesimal dari turunan dan waktu. Penjumlahahan takterhingga ini adalah pengintegralan; sehingga operasi penginteralan mengizinkan pemulihan fungsi semula dari turunannya. Dengan pemikiran yang sama, operasi ini juga dapat bekerja terbalik ketika kita menurunkan hasil dari sebuah integral untuk memulihkan turunan semula.
2 Bagian Teorema Dasar Kalkulus
Terdapat dua bagian teorema dasar kalkulus. Secara kasar, bagian pertama berkutat pada turunan sebuah antiturunan (integral tak tentu), sedangkan bagian kedua berkutat pada relasi antara antiturunan dan integral tertentu.
Bagian pertama Teorema Dasar Kalkulus
Bagian ini kadang-kadang dirujuk sebagai teorema dasar kalkulus pertama.
Misalkan f adalah fungsi bernilai real yang kontinu, didefinisikan pada sebuah interval tertutup [a, b]. Misalkan juga F adalah fungsi yang didefinisikan, untuk semua x pada [a, b], dengan

Maka F adalah kontinu pada [a, b], terdiferensialkan (differentiable) pada interval terbuka (a, b), dan

untuk semua x pada (a, b)
Bagian kedua Teorema Dasar Kalkulus
Bagian ini kadang-kadang dirujuk sebagai teorema dasar kalkulus kedua.
Misalkan f adalah sebuah fungsi bernilai real yang kontinu, didefinisikan pada interval tertutup [a, b]. Misalkan juga F adalah antiturunan dari f, yakni salah satu dari fungsi-fungsi yang tak terhingga banyaknya yang untuk semua x pada [a, b],

Maka

Korolari
Misalkan f adalah fungsi bernilai real yang didefinisikan pada sebuah interval tertutup [a, b]. Misalkan juga F adalah sebuah fungsi yang untuk semua x pada [a, b],
Maka untuk semua x pada [a, b],

dan

Teorema dasar kalkulus
Teorema dasar kalkulus menjelaskan relasi antara dua operasi pusat kalkulus, yaitu pendiferensialan (differentiation) dan pengintegralan (integration).
Bagian pertama dari teorema ini, kadanng disebut sebagai telurma dasar kalkulus pertama, menunjukkan bahwa sebuah integral taktentu dapat dibalikkan menggunakan pendiferensialan.
Bagian kedua, kadang-kadang disebut sebagai teorema dasar kalkulus kedua, mengizinkan seseorang menghitung integral tertentu sebuah fungsi menggunakan salah satu dari banyak antiturunan (integral tak tentu). Bagian teorema ini memiliki aplikasi yang sangat penting, karena ia dengan signifikan mempermudah perhitungan integral tertentu.
Penyataan yang pertama kali dipublikasikan dan bukti matematika dari versi terbatas teorema dasar ini diberikan oleh James Gregory (1638-1675). Isaac Barrow membuktikan versi umum bagian pertama teorema ini, sedangkan anak didik Barrow, Isaac Newton (1643-1727) menyelesaikan perkembangan dari teori matematika di sekitarnya. Gottfried Leibniz (1646–1716) mensistematisasi ilmu ini menjadi kalkulus untuk kuantitas infinitesimal.
Teorema dasar kalkulus kadang-kadang juga disebut sebagai Teorema dasar kalkulus Leibniz atau Teorema dasar kalkulus Torricelli-Barrow.
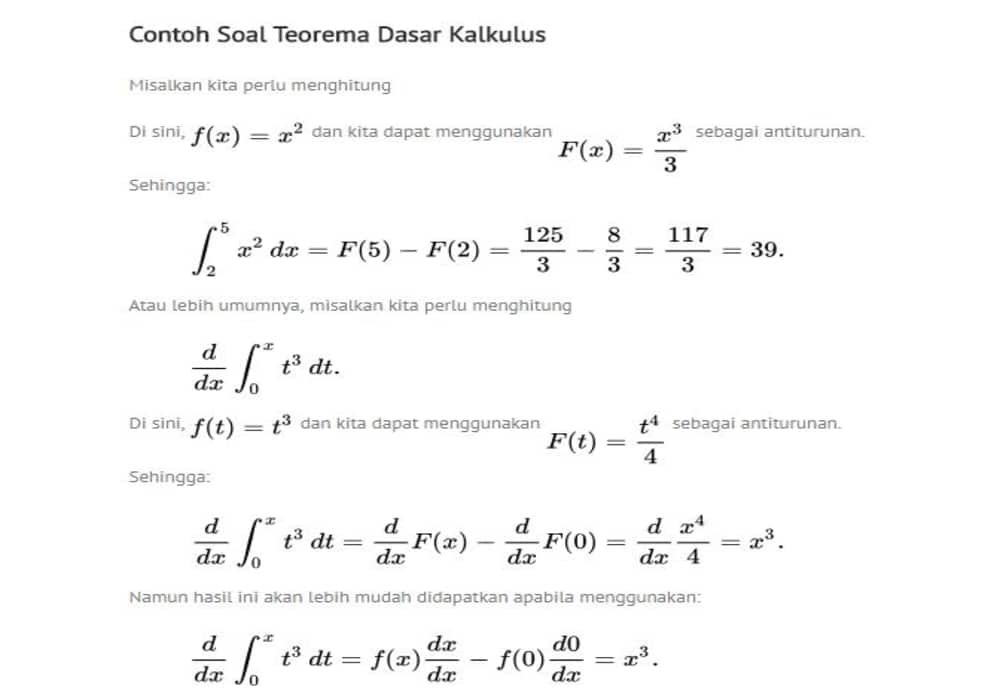
Contoh Soal Teorema Dasar Kalkulus
Misalkan kita perlu menghitung
Di sini,  dan kita dapat menggunakan
dan kita dapat menggunakan  sebagai antiturunan. Sehingga:
sebagai antiturunan. Sehingga:

Atau lebih umumnya, misalkan kita perlu menghitung

Di sini,  dan kita dapat menggunakan
dan kita dapat menggunakan  sebagai antiturunan. Sehingga:
sebagai antiturunan. Sehingga:

Namun hasil ini akan lebih mudah didapatkan apabila menggunakan:

Pembuktian bagian pertama Teorema Dasar Kalkulus
Andaikan
Misalkan terdapat dua bilangan x1 dan x1 + Δx pada [a, b]. Sehingga didapatkan

dan

Pengurangan kedua persamaan di atas menghasilkan

Bisa ditunjukan bahwa

- (Jumlah dari luas wilayah yang bersampingan sama dengan jumlah kedua wilayah yang digabungkan.)

Dengan memanipulasi persamaan ini, kita dapatkan

Substitusikan persamaan di atas ke (1), sehingga

Menurut teorema nilai antara untuk pengintegralan, terdapat sebuah c pada [x1, x1 + Δx] sehingga

Substitusikan persamaan di atas ke (2), kita dapatkan

Bagi kedua sisi dengan Δx, menghasilkan
- Perhatikan pula ekspresi pada sisi kiri persamaannya adalah hasil bagi beda Newton untuk F pada x1.

Dengan mengambil limit Δx → 0 pada kedua sisi persamaan:

Ekspresi pada sisi kiri persamaan adalah definisi turunan dari F pada x1.

Untuk mencari limit lainnya, kita gunakan teorema apit. c ada pada interval [x1, x1 + Δx], sehingga x1 ≤ c ≤ x1 + Δx.
Juga,  dan
dan 
Sehingga menurut teori apit,

Substitusikan ke (3), kita dapatkan

Fungsi f kontinu pada c, sehingga limit dapat diambil di dalam fungsi. Oleh karena itu, kita dapatkan

yang menyelesaikan pembuktian
(Leithold dkk., 1996)
Pembuktian bagian kedua Teorema Dasar Kalkulus
Ini adalah pembuktian limit menggunakan penjumlahan Riemann.
Misalnya f kontinu pada interval [a, b], dan F adalah antiturunan dari f. Dimulai dengan kuantitas

Misalkan pula terdapat bilangan-bilangan
- x1, …, xn
sehingga
Maka

Sekarang kita tambahkan setiap F(xi) bersamaan dengan balikan aditif (inverse additive), sehingga kuantitas yang dihasilkan adalah sama:
![{\displaystyle {\begin{matrix}F(b)-F(a)&=&F(x_{n})\,+\,[-F(x_{n-1})\,+\,F(x_{n-1})]\,+\,\ldots \,+\,[-F(x_{1})+F(x_{1})]\,-\,F(x_{0})\,\\&=&[F(x_{n})\,-\,F(x_{n-1})]\,+\,[F(x_{n-1})\,+\,\ldots \,-\,F(x_{1})]\,+\,[F(x_{1})\,-\,F(x_{0})]\,.\end{matrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2fda47bf12b57e91f91c67e0c310fafe4f846db8)
Kuantitas di atas dapat ditulis sebagai penjumalhan berikut:
![{\displaystyle F(b)-F(a)=\sum _{i=1}^{n}\,[F(x_{i})-F(x_{i-1})]\,.\qquad (1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f66b68a4db2bb6f252c3eb5e1e4f6bcdac310093)
Kemudan kita akan menggunakan teorema nilai purata. Dinyatakan dengan singkat,
Misalkan F kontinu pada interval tertutup [a, b] dan terdiferensialkan pada interval terbuka (a, b). Maka terdapat c pada (a, b) yang

Sehingga

Fungsi F terdiferensialkan pada interval [a, b]; sehingga ia juga terdiferensialkan dan kontinu pada setiap interval xi-1. Oleh karena itu, menurut teorema nilai purata,

Substitusikan persamaan di atas ke (1), kita dapatkan
![{\displaystyle F(b)-F(a)=\sum _{i=1}^{n}\,[F'(c_{i})(x_{i}-x_{i-1})]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/908e2bba9b00ee7a955e88122c76bd9be3d26d39)
Asumsi ini mengimplikasikan  Juga,
Juga,  dapat diekspresikan sebagai
dapat diekspresikan sebagai  dari partisi
dari partisi  .
.
![{\displaystyle F(b)-F(a)=\sum _{i=1}^{n}\,[f(c_{i})(\Delta x_{i})]\,.\qquad (2)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/94f81b337b19e5bfa63f7af16b49932bd741a128)

Perhatikan bahwa kita sedang menjelaskan luas persegi panjang, dengan lebar kali tinggi, dan kita menggabungkan total semua luas persegi panjang tersebut. Setiap persegi panjang, dengan teorema nilai purata atau teorema nilai rata-rata, merupakan pendekatan dari bagian kurva yang digambar. Juga perhatikan bahwa  tidak perlulah sama untuk setiap nilai , atau dengan kata lain lebar persegi panjang dapat berbeda-beda. Apa yang perlu kita lakukan adalah mendekatkan kurva tersebut dengan
tidak perlulah sama untuk setiap nilai , atau dengan kata lain lebar persegi panjang dapat berbeda-beda. Apa yang perlu kita lakukan adalah mendekatkan kurva tersebut dengan  persegi panjang. Semakin kecil partisi ini dan semakin besar n, maka kita akan mendapatkan luas wilayah kurva yang semakin mendekati nilai sebenarnya.
persegi panjang. Semakin kecil partisi ini dan semakin besar n, maka kita akan mendapatkan luas wilayah kurva yang semakin mendekati nilai sebenarnya.
Dengan mengambil limit ekspresi norma partisi mendekati nol, kita mendapatkan integral Riemann. Yakni, kita mengambil limit partisi yang terbesar mendekati nol dalam hal ukuran, sehingga partisi-partisi lainnya lebih kecil dan jumlah partisi mendekati tak terhingga.
Maka kita mengambil limit pada kedua sisi (2). Kita dapatkan
![{\displaystyle \lim _{\|\Delta \|\to 0}F(b)-F(a)=\lim _{\|\Delta \|\to 0}\sum _{i=1}^{n}\,[f(c_{i})(\Delta x_{i})]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7b529d99855d23cb81925807978f33173449b08a)
Baik F(b) maupuan F(a) tidak bergantung pada ||Δ||, sehingga limit pada bagian sisi kiri tetaplah F(b) – F(a).
![{\displaystyle F(b)-F(a)=\lim _{\|\Delta \|\to 0}\sum _{i=1}^{n}\,[f(c_{i})(\Delta x_{i})]\,.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f54a9cbfa183b8c5e05f15d28302ee208a7c0c0a)
Ekspresi pada sisi kanan persamaan merupakan definisi dari integral terhadap f dari a ke b. Sehingga kita dapatkan:

yang menyelesaikan pembuktian.
Perampatan
Kita tidak perlu mengasumsikan kekontinuan f pada keseluruhan interval. Bagian I dari teorema menyatakan: Jika f adalah setiap fungsi terintegral Lebesgue pada [a, b] dan x0 adalah bilangan pada [a, b] sehingga f kontinu pada x0, maka

terdiferensialkan untuk x = x0 dengan F’(x0) = f(x0). Kita dapat melonggarkan kondisi f lebih jauh dan andaikan bahwa ia hanyalah terintegralkan secara lokal/setempat. Pada kasus ini, kita dapat menyimpulkan bahwa fungsi F terdiferensialkan hampir di mana-mana dan F’(x) = f(x) hampir di mana-mana. Ini kadang-kadang dikenal sebagai Teorema pendiferensialan Lebesgue.
Bagian II dari teorema adalah benar untuk setiap fungsi terintegral (integrable fungction) Lebesgue f yang mempunyai sebuah antiturunan F (tidak semua fungsi terintegral mempunyainya).
Versi teorema Taylor yang mengekspresikan suku galat (error term) sebagai sebuah integral dapat dilihat sebagai sebuah perampatan (generalization) dari teorema dasar.
Terdapat sebuah versi teorema untuk fungsi kompleks: andaikan U adalah himpunan terbuka pada C dan f: U → C adalah fungsi yang mempunyai sebuah antiturunan holomorfik F pada U. Maka untuk setiap kurva γ: [a, b] → U, integral kurva dapat dihitung sebagai

Teorema dasar dapat dirampatkan ke integral kurva dan permukaan pada dimensi yang lebih tinggi dan pada manifold.
Salah satu pernyataan yang paling kuasa (powerful) adalah teorema Stokes: Diberikan M sebagai manifold mulus sesepenggaldimensin berorientasi dan omega  adalah sebuah bentuk n−1, yakni bentuk diferensial yang disangga secara kompak pada M kelas C1. Jika ∂M menandakan sempadanM dengan orientasi terinduksinya, maka
adalah sebuah bentuk n−1, yakni bentuk diferensial yang disangga secara kompak pada M kelas C1. Jika ∂M menandakan sempadanM dengan orientasi terinduksinya, maka

Di sini  adalah turunan luar yang hanya terdefinisikan menggunakan struktur manifold.
adalah turunan luar yang hanya terdefinisikan menggunakan struktur manifold.
Teorema ini seringkali digunakan dalam situasi ketika M adalah submanifold berorientasi terbenam (embedded oriented submanifold) dari manifold yang lebih besar di mana bentuk omega didefinisikan.
Bacaan Lainnya Yang Dapat Membuat Anda lebih Pintar
- Teorema Rolle Matematika Beserta Contoh Soal dan Jawaban (Kalkulus)
- Deret Taylor Matematika dan Teorema Taylor Bersama Contoh Soal dan Jawaban (Kalkulus)
- Deret Pangkat Matematika Beserta Contoh Soal dan Jawaban (Kalkulus)
- Rumus Limit Fungsi Matematika Kalkulus Beserta Contoh Soal dan Jawaban
- Fungsi Matematika: Linear, Konstan, Identitas – Beserta Soal dan Jawaban
- Topologi Matematika – Contoh Soal dan Jawaban Ruang Topologi
- Rumus Matematika Keuangan – Contoh Soal dan Jawaban
- Induksi Matematika Rumus, Pembuktian, Deret, Keterbagian, Pertidaksamaan, Soal, Pembahasan dan Jawaban
- Jenis dan Bidang-Bidang Matematika: Besaran, Ruang, Perubahan, Struktur, Dasar dan Filsafat, Diskret, Terapan
- Berapa Kecerdasan IQ Anda? Tes IQ Anda Disini
- Bidang-Bidang Matematika: Besaran, Ruang, Perubahan, Struktur, Dasar dan Filsafat, Diskret, Terapan
- 10 Cara Belajar Pintar, Efektif, Cepat Dan Mudah Di Ingat – Untuk Ulangan & Ujian Pasti Sukses!
- Tulisan Menunjukkan Kepribadian Anda & Bagaimana Cara Anda Menulis?
- Penyakit yang dapat dicegah dengan vaksin – Wajib diketahui
- Top 10 Sungai Terpanjang Di Dunia
- Tempat Wisata Yang Wajib Dikunjungi Di Indonesia Dan Luar Negri
- Kepalan Tangan Menandakan Karakter Anda & Kepalan nomer berapa yang Anda miliki?
- Bentuk Kaki Menandakan Karakter Anda – Bentuk Kaki nomer berapa yang Anda miliki?
Unduh / Download Aplikasi HP Pinter Pandai
Respons “Ohh begitu ya…” akan sering terdengar jika Anda memasang applikasi kita!
Siapa bilang mau pintar harus bayar? Aplikasi Ilmu pengetahuan dan informasi yang membuat Anda menjadi lebih smart!
Pinter Pandai “Bersama-Sama Berbagi Ilmu”
Quiz | Matematika | IPA | Geografi & Sejarah | Info Unik | Lainnya | Business & Marketing